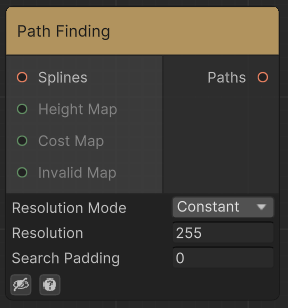
Modifies the Input spline to follow a path provided the diferent input maps.
- Height Map: If provided, it will try to find a path along the height map keeping the maximum height difference under Max Height Difference
- Cost Map: Extra map with a set Cost Strength for the path to avoid
- Invalid Map: If set, the path will never cross that area.

Input

Output